因为学校里的各种事情,以及复习考试,自从上次更新博客已经是四个多月的事情了,距离上次写图形学的博客那就更久了。
最近刚放暑假把之前只看了光线追踪部分的 GAMES101 完整的学习了一遍,还是非常惊喜的:很多之前不太清楚的概念(特别是数学方面的)过了一段时间再看又有了些新的理解。因为课程时间限制的问题,有有部分内容没有比较详细的讲,这里记录一些我自己的理解。
三维旋矩阵
这个东西我已经在之前 RT: The Next Week 的文章中写过了,不过之前的解释比较。。。怪,很啰嗦,并且没有从坐标系变换的角度来解释,这里就重新写下(当然我还没有系统的学过线性代数,所以以下内容可能还是很扯)。
绕三个轴的三维旋转矩阵分别可以写作下列的形式:
Rx(θ)=1000cosθsinθ0−sinθcosθ
Rz(θ)=cosθsinθ0−sinθcosθ0001
Ry(θ)=cosθ0−sinθ010sinθ0cosθ
不难发现,绕 y 轴旋转的矩阵中,sinθ 和 −sinθ 的位置似乎是反的,非常奇怪。原视频中,旋转矩阵是通过选取一些特殊点完成推导的,这里我感觉用坐标系变换的方法更加易于理解(虽然闫老师觉的这个更复杂)。
首先看绕 z 轴的,这个比较简单,基本上就是二维旋转矩阵的情况:
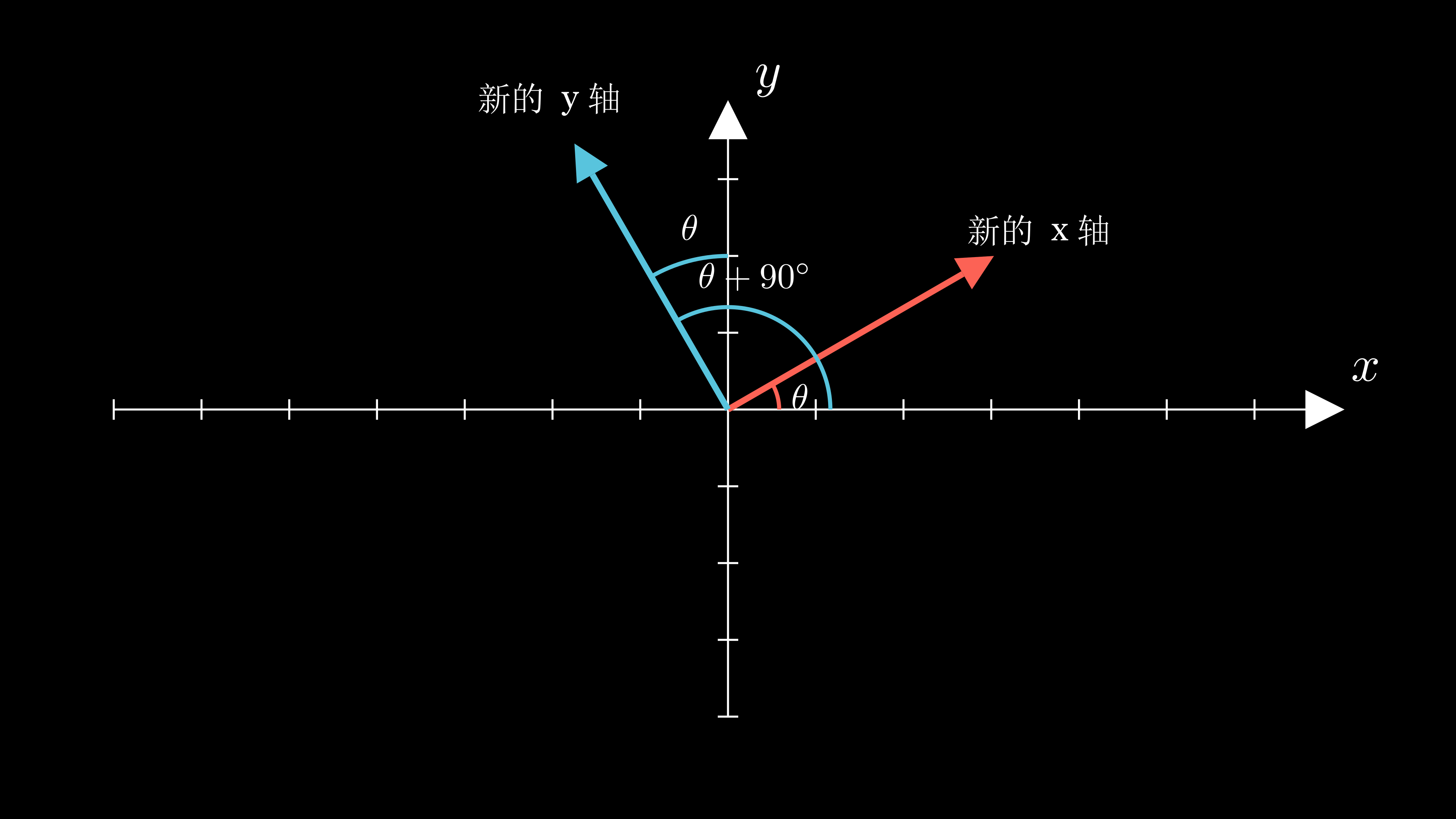
注意这里我虽然没有加入 z 轴,但是通过右手定则,可以发现 z 轴是朝着穿出屏幕方向的。
我们可以分别把新 x 轴 (i^) 和新 y 轴(j^)用向量形式表示出来,注意这里这两个向量都是单位向量:
i^=cosθsinθ0
观察 j^ 和原 y 轴的夹角,可以发现是 θ,所以可以把 i^ 的向量形式“反”一下。还有一点需要注意的是:j^ 的 x 分量是负数:
j^=−sinθcosθ0
其实不管在什么坐标系中,任何坐标都是通过单位向量乘以一些长度得到的(可以想象成一个点在某个方向移动一些距离)。比如在平面直角坐标系中,(1,2) 的坐标就可以理解成,把一个点向着 x 方向移动 1,向着 y 方向移动 2。
所以,在旋转过后的坐标系,对于一个点 (x,y,z),他的新坐标就是 (xi^,yj^,z)。相当于是向着 i^ 方向移动了 x 个单位,向着 j^ 方向移动了 y 个单位,以及向原来的 z 方向(虽然没有变换,但是这里我们还是把它标记成 k^)移动了 z 个单位。
所以新的坐标就是:
p=xcosθsinθ0+y−sinθcosθ0+z001
观察之前提供的旋转矩阵公式,能发现 Rz 确实能满足上式:
cosθsinθ0−sinθcosθ0001xyz=xcosθsinθ0+y−sinθcosθ0+z001
这里有一个比较有意思的地方,已经通过不同的颜色标记出来了:可以发现,旋转矩阵中的三列分别对应着 i^,j^ 和 k^,也就是新坐标系中的三个轴的方向。
这样一来,从坐标系变换的角度,就非常容易理解为什么旋转矩阵是这么写的了。我们可以直接把变换后的三个轴的方向写到矩阵中的三列,从而得到旋转矩阵。
我们可以用相同的方法来分析绕 y 轴的旋转,就是那个看起来“反”了的矩阵。
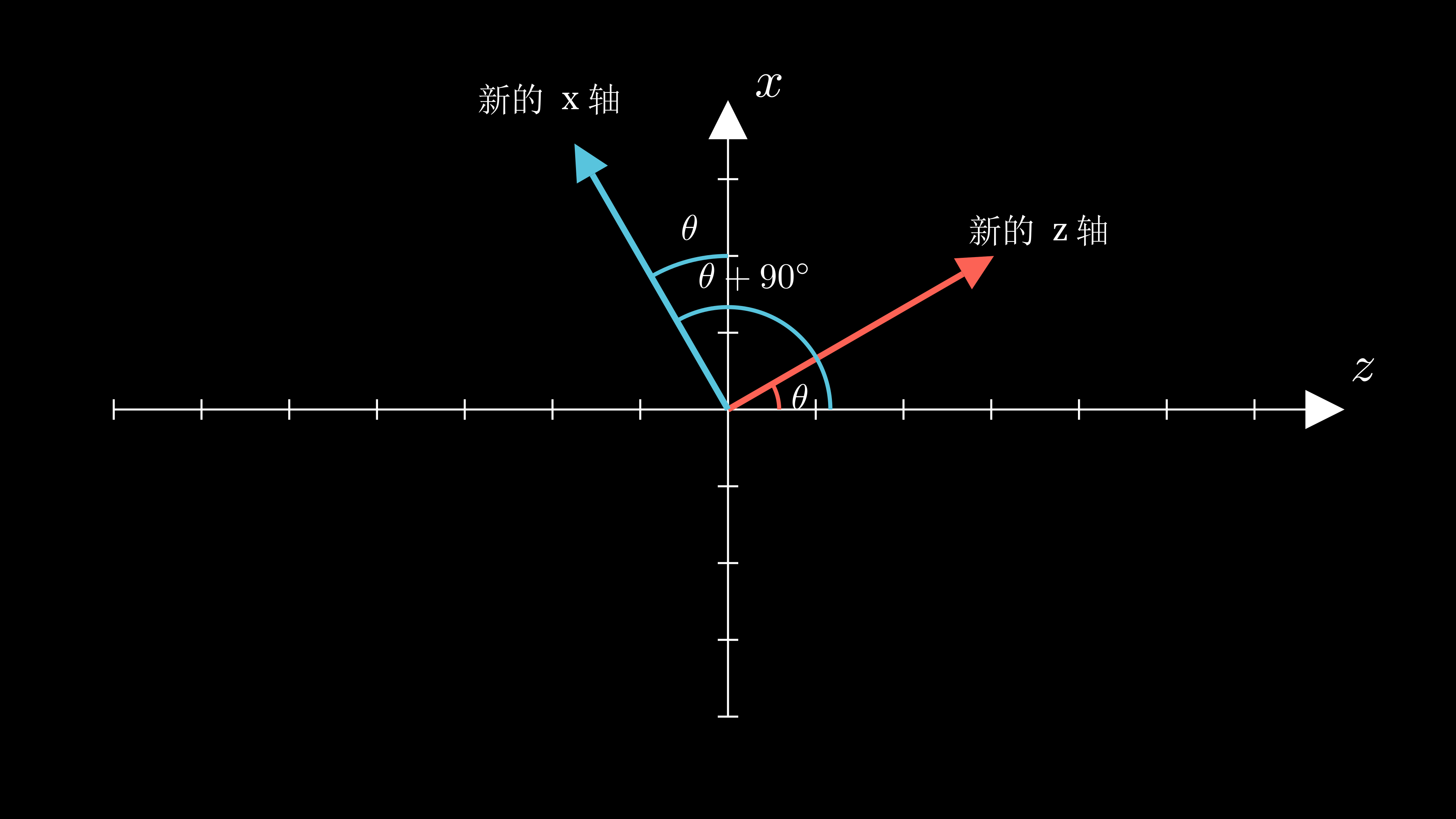
虽然看起来和刚刚的图很相似,但是可以发现图中的标签已经变过了。同样,通过右手定则,可以发现这时 y 轴是朝着穿出屏幕方向的。
那么有了刚刚的观察,现在我们只需要找到当前情况下的 i^,j^,k^ 就可以写出绕 y 轴的旋转矩阵了。
首先,对于新的 z 轴,也就是 k^,我们可以类比绕 z 轴情况下的 i^,它的向量形式如下:
k^=sinθ0cosθ
这里 y 分量为 0 的原因很明显,因为我们考虑的是绕 y 轴旋转,所以 y 肯定没有变化。
然后,类比绕 z 轴情况下的 j^,我们可以得到 i^ 的向量形式:
i^=cosθ0−sinθ
对于 j^,因为和原来没有变化,所以可以简单的写作:
j^=010
合并这些表示新 x,y,z 方向的向量,可以得到:
[i^ ∣ j^ ∣ k^]=cosθ0−sinθ010sinθ0cosθ
重心坐标
和 GAMES101 课程中讲的一样,重心坐标(特别是三角形的)在图形学中非常有用,可以很方便的把三角形节点上的信息插值到三角形面上。
我最初听课的时候还是有较多疑惑的,比如为什么一定要三个系数和相加等于 1,并且三个系数都不为负数,某个点才是在三角形内部的呢?
后来思考了一段时间,感觉用“顾名思义”的方式理解这个概念是直观的,也就是从重心的角度去理解。
物理角度
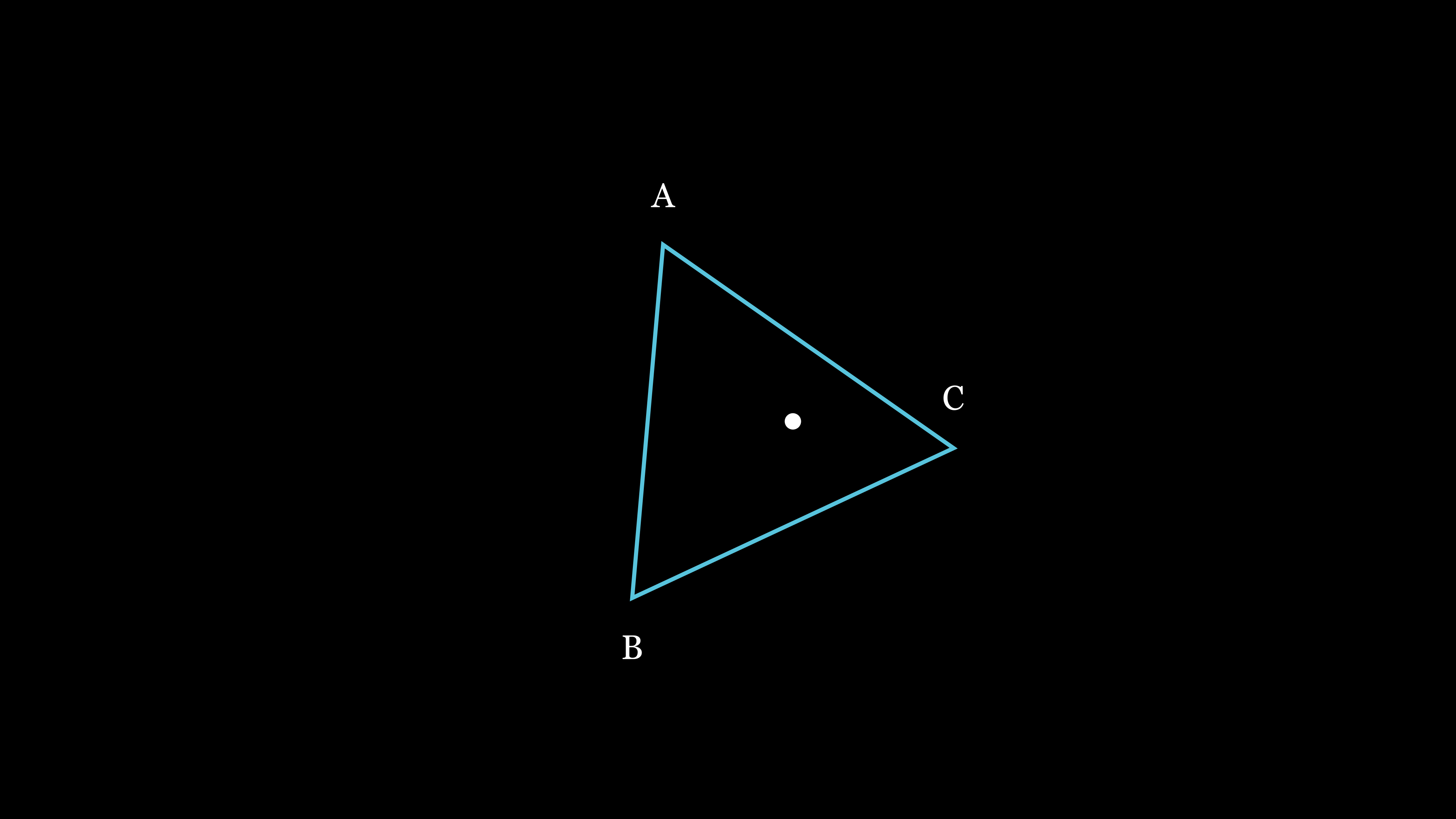
假设有一个三角形,其三个顶点的质量分别为 Ma,Mb,Mc,并且除了顶点外,别的区域质量均为 0,那么根据重心的定义,三角形的重心就是:
重心=Ma+Mb+McMaA+MbB+McC
把这三个项分开,可以得到:
AMa+Mb+McMa+BMa+Mb+McMb+CMa+Mb+McMc
这个形式简直和重心坐标的 αA+βB+γC 太相似了,每项都是一个系数乘以一个顶点的坐标。
观察形如 Ma+Mb+McMa 的项,可以发现,计算重心时的系数完全符合重心坐标的要求,即 α+β+γ=1,并且每项不是负数。
现在用物理上重心的思路来思考,我们在转换普通坐标到重心坐标时到底在转换什么?
把重心公式的系数对应到重心坐标的系数,也就是 Ma+Mb+McMa→α,我们能发现,这些系数实际上是三角形每个顶点的质量占总质量的比例。
也就是说,在转换的过程中(假设把 p 点从笛卡尔坐标系转换到重心坐标系),我们实际上计算的是这样一个问题:三角形的三个顶点如何分配重量,才能使得三角形的重心位于 p 点?
转换后的坐标,(α,β,γ) 其实就是在三角形三个顶点上分配的重量的比例。
这样一来,我们就很容易理解这三个数为什么符合相加为 1 并且非负才能使点在三角形内部的要求了。首先,从物理的角度来思考,如果质量非负,那么重心一定在物体的内部。其次,如果要符合重心的定义,那么 α,β,γ 相加一定是等于 1 的。因为它们三个代表的是三个顶点的质量占总质量的比例,所以这三个数字相加一定是 1(对应总质量)。
当然,重心坐标是由物理上的定义推广出来的,所以用纯代数的方法来说明可能更有说服力。
代数角度
我们知道,三角形的重心坐标就是三个顶点的线性组合来标记一个坐标,也就是 p=αA+βB+γC。现在我们可以尝试用代数的方式来说明,为什么这三个系数相加等于 1 并且非负才能使点在三角形内部。
首先,我们可以把 p 点用另一种方式表示出来,这对之后的推导会有帮助:
p=A+uAB+vAC
注意这里的 u 和 v 其实和重心坐标的三个系数没有关系,这个式子的含义是:从 A 点出发,沿着 AB 方向走 u 个单位,然后沿着 AC 方向走 v 个单位,就可以到达 p 点。
首先,如果要让点在三角形内部,有一点是可以确定的:u 和 v 是非负的,因为考虑当前在 A 点上,只向着 BA 或者 CA 方向走任何距离,马上就会走出三角形。
对上式稍微做一点变形,可以得到:
p−A=uAB+vACpA=uAB+vACuAB+vAC−pA=0
可以这么理解这个式子:我们把包括 p 点在内的所有点都通过 −OA 移动了一个距离,这个时候 A 一定在原点。
这样这个式子就很直观了:先通过 uAB+vAC 这个向量从原点走到 p 点,再从 p 点用 pA 走回 A,也就是原点。
因为这两个部分方向相反并且大小相同(一个从 A 走到 p,一个从 p 走到 A),所以这两个向量相加一定是 0。
拆开这个式子,再重新整理,可以得到:
u(B−A)+v(C−A)+A−puB−uA+vC−vA+A−pA(1−u−v)+uB+vC−p(1−u−v)A+uB+vC=0=0=0=p
这个形式完全和重心坐标一致,所以我们可以确定:α=1−u−v,β=u,γ=v。
把这些东西相加,可以发现 1−u−v+u+v=1,确实,重心坐标的三个系数相加一定是 1。
前面我们已经说明了,u 和 v 是非负的,但如果 u+v>1,α 不就是负数了吗?
考虑下图,AM 是 A 到 BC 的一条垂线(M 不是 BC 的中点,这里不用等边三角形可能更清晰,但是我懒):
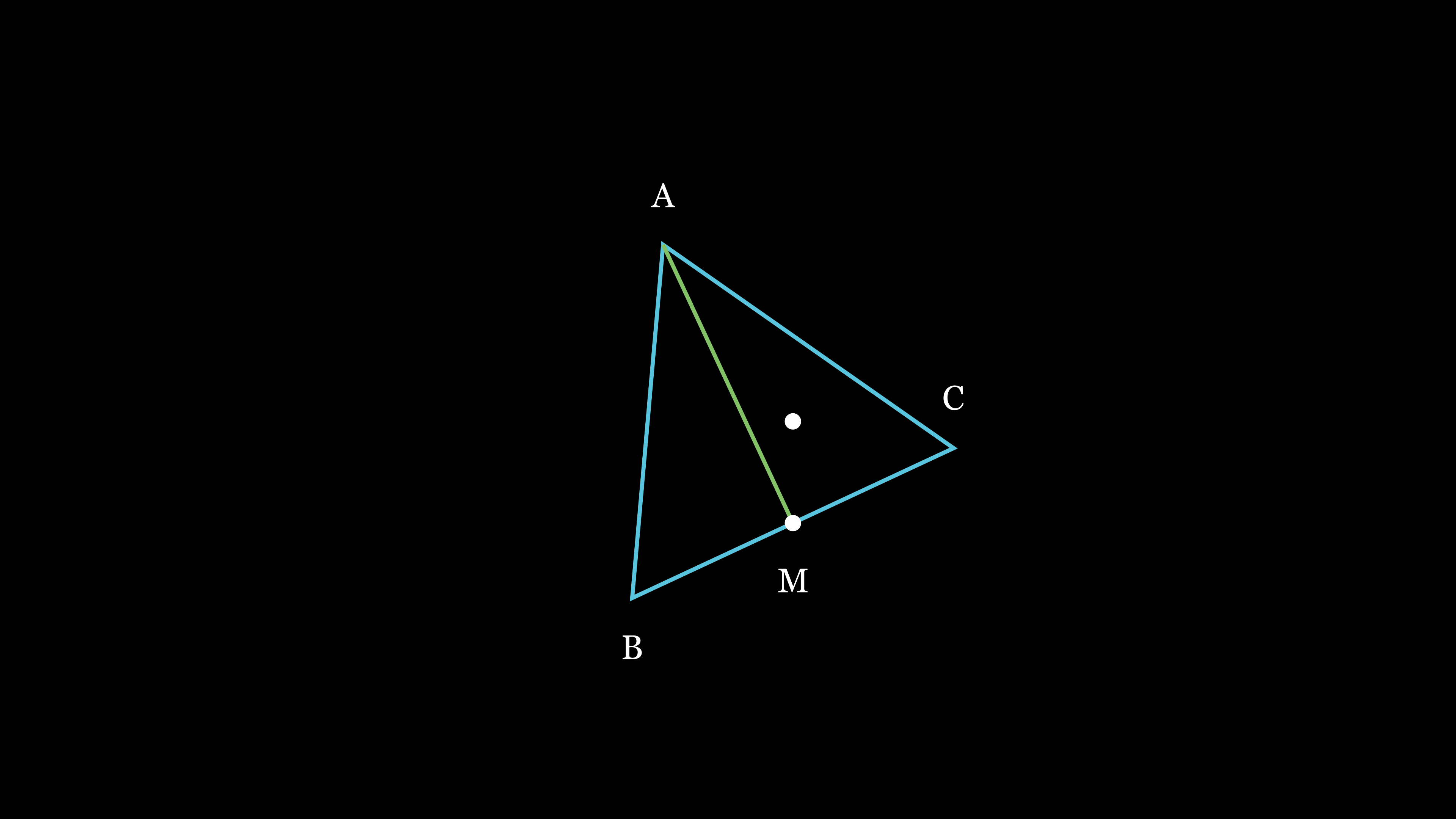
回到最初的定义中,也就是 p=A+uAB+vAC,uv 分别是朝 AB 和 AC 方向走过的距离。
那么 uAB 投影在 AM 上的长度就是 ∣AM∣uAB⋅AM
观察上图可以发现,如果 u 为 1,也就是 AB 有完整的长度,这个投影的长度一定等于 ∣AM∣。同样的,如果 u 为 0,投影在 AM 方向的长度也一定是 0。
因为投影,或者说点乘是一个线性的操作,所以如果 u 为 0.5,投影的长度一定是 ∣AM∣ 的一半。
因此我们可以说,AB 在 AM 上的投影长度是 u∣AM∣
相同的,AC 在 AM 方向的投影长度符合一样的规则。
为了让 p 点留在三角形内部,uAB+vAC 这个向量投影在 AM 上的长度必须小于等于 AM 本身的长度,不然 p 点就会从 BC 这条边跑出三角形。
AB 在 AM 上的投影长度是 u∣AM∣,AC 在 AM 上的投影长度是 v∣AM∣,自然,这两个向量的和在 AM 上的投影长度就是 (u+v)∣AM∣。
前面说过,为了使得 p 点留在三角形内部,uAB+vAC 这个向量投影在 AM 上的长度必须小于等于 AM 本身的长度,也就是 (u+v)∣AM∣≤∣AM∣,那么 u+v≤1。
因为 α=1−u−v,并且 u+v≤1,所以我们可以说明,α 也一定是非负的。
至此我们已经能说明,为什么一个在三角形内部的点就要符合 α+β+γ=1,并且每个系数非负了。当然要把一个平面直角的坐标转换到重心坐标,还是需要一些相对复杂的计算的。这部分的内容,我觉得这篇博客中介绍的第一种方法相对易于理解并且很巧妙,有兴趣的可以看下。

![[Stanford CS144] Lab4 实验记录](/img/CS144/tcp%E7%8A%B6%E6%80%81%E6%B5%81%E8%BD%AC%E5%9B%BE.jpg)
![[Stanford CS144] Lab0-Lab3 实验记录](/img/CS144/sponge%E7%BB%93%E6%9E%84%E5%9B%BE.svg)